Носимая Механическая Перчатка для управления роботом, Перчатка для соматосенсорного управления Экзоскелетом, управление роботом
Магазин: Инструменты





Носимая Механическая Перчатка для управления роботом, Перчатка для соматосенсорного управления Экзоскелетом, управление роботом
Информация о продукте
1. Описание :
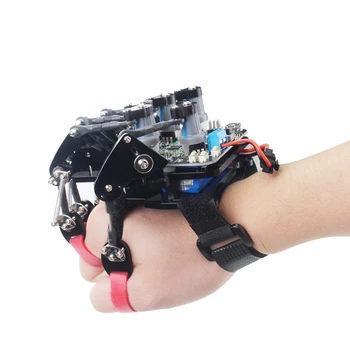
1). механическая перчатка с открытым исходным кодом на базе Arduino; Однокристальная модель: ATmega328P
2). открытая схема и исходный код;
3) встроенный модуль Bluetooth 4.0 и датчик ускорения;
4) обеспечивают процедуры управления, которые могут управлять роботизированной рукой, бионическим роботом, автомобилем и так далее.
Примечание:
1) Не включает аккумулятор и аккумуляторную линию.Рекомендуется использовать литий-ионный аккумулятор 7,4 В, 1000 мАч, 20C.
Размер аккумулятора: 55 x 31 x 15 мм
2). Используйте эту перчатку для управления вашим роботом, убедитесь, что модуль Bluetooth вашего робота HC-08 основан на протоколе Bluetooth 4.0.
Материал: пластик + металл
Цвет как показано
Содержимое упаковки:
1 х пригодные для носки механические перчатки
Только вышеуказанное содержание посылка, другие товары не включены.
Примечание: отражение света и различные дисплеи могут привести к тому, что цвет изделия на картинке немного отличается от реального.Допустимая погрешность измерения составляет +/- 1- 3 см.
- Происхождение - Материковый Китай
- Тип - Детали для ручного инструмента







































